以前、自律走行の事例紹介をしましたが、今回は、自己位置認識についての実例をご紹介します。導入のご参考になりましたら幸いです。
サーバールーム内の監視ロボット【実例】
監視ロボットの事例です。
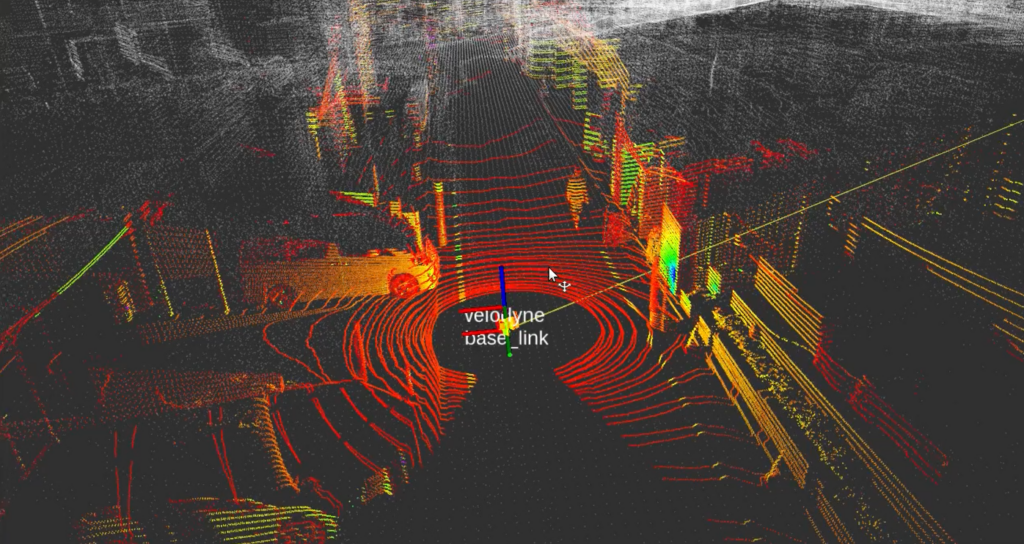
LiDARの点群情報から周辺環境を認識して、周辺の支障物に接触することなく、あらかじめ指定された経路を巡回走行します。
自律巡回走行
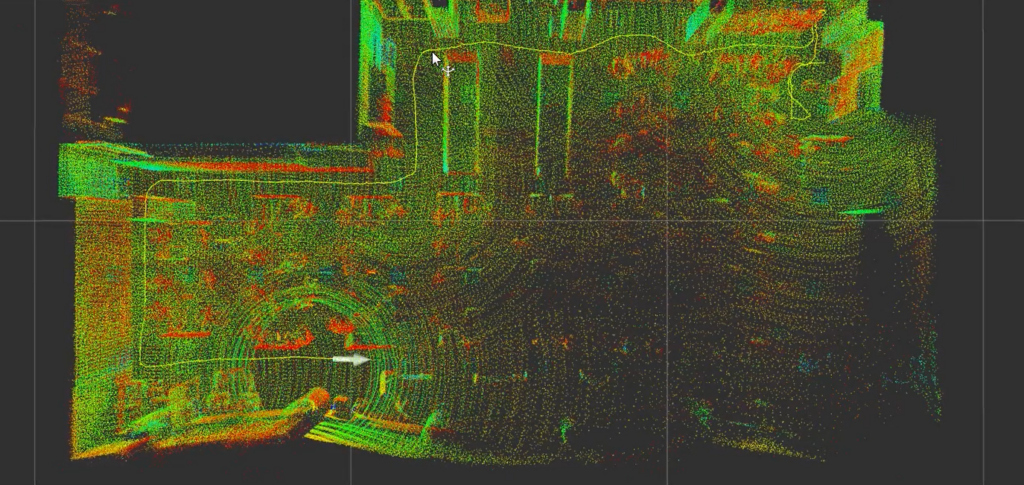
点群情報から地図生成および自己位置認識(SLAM)を行い、初回のリモコン走行で生成した周辺地図情報と照らし合わせて、任意の経路を自動で巡回走行します。
遠隔映像監視
映像ストリーミング技術により、ロボットに搭載されているカメラの映像を別室から遠隔でリアルタイムに監視し、サーバーの稼働状況を確認できます。
こちらのイメージは屋外でのデモ操作の様子です。リモコンでロボットを操作しています。
LiDAR(ライダー)とは
LiDAR (Light Detection and Ranging)は、日本語では「光による検知と測距」で、センサーの一種です。レーザーLiDARと呼ばれることもありますが、よく耳にする「レーダー」とは基礎技術が異なります。
レーダーは電波を使って距離測定を行いますが、LiDARはレーザー光を使って距離測定をします。また、対象までの距離のみならず、位置や形まで正確に検知できます。
LiDARは自動運転には欠かせない技術として、現在も研究が行われています。
SLAM(スラム)とは
SLAM(Simultaneous Localization and Mapping)は直訳すると「Simultaneous=同時に行う」「Localization=位置の推定」「Mapping=地図の作成」となり、言い方を変えると「自己位置の推定と地図作成を同時に行う」技術の総称です。
もう少し表現を変えると「移動体(例えば車)が自分のいる位置を推測しながら、周辺の環境を把握する(地図を描く)」技術であり、具体的にはお掃除ロボットなどで採用されています。
お掃除ロボットも最初に部屋の間取りを読み込ませることなく、自動で動き回り、自分で地図を作成しています。
SLAMの実現には、先ほどご説明したLiDARなど、さまざまなセンサーを使って、センシング(センサーを使った計測、数値化)する必要があります。
まだまだお伝えしたいことがたくさんありますが、次回は、LiDARの活用事例についてご紹介したいと思います。
reference:https://wiki.ros.org/Documentation
GEBOTSフレームワークのトライアル
GEBOTSフレームワークのトライアルについてはこちらをご参照ください。
https://adas.nswmobility.jp/lp.html