
以前ご紹介したGEBOTSフレームワークについて、今回は実例を交えて、活用ユースケースをご紹介します。
実際の導入イメージの参考としていただければ幸いです。
自律運搬ロボット
農林水産省で実施している「スマート農業導入実証プロジェクト」で採択された、新潟県佐渡島の「おけさ柿」の運搬ロボットの事例です。
スマート農業導入実証プロジェクトとは?
ロボットなどの先端技術を活用した「スマート農業」を実証し、導入を加速させていくため、農林水産省で推進している事業です。
スマート農業技術を実際の生産現場に導入して、技術実証を行い、導入による経営への効果を明らかにすることを目的としています。
出典:https://www.affrc.maff.go.jp/docs/smart_agri_pro/smart_agri_pro.htm
自動運搬走行

高精度位置測位(RTK-GNSS)により指定経路を自律走行します。
スマートフォンとの連携により、ロボットに最短経路での移動指示を出したり、ロボットの状態を遠隔から監視したりできます。
作業者追従走行
距離画像カメラにより作業者を認識して追従走行します。
あわせて支障物への接近を検知し、接触前に車両を停止します。
追従走行する様子については、こちらの動画でご覧ください。
ロボットによる屋外自動巡回
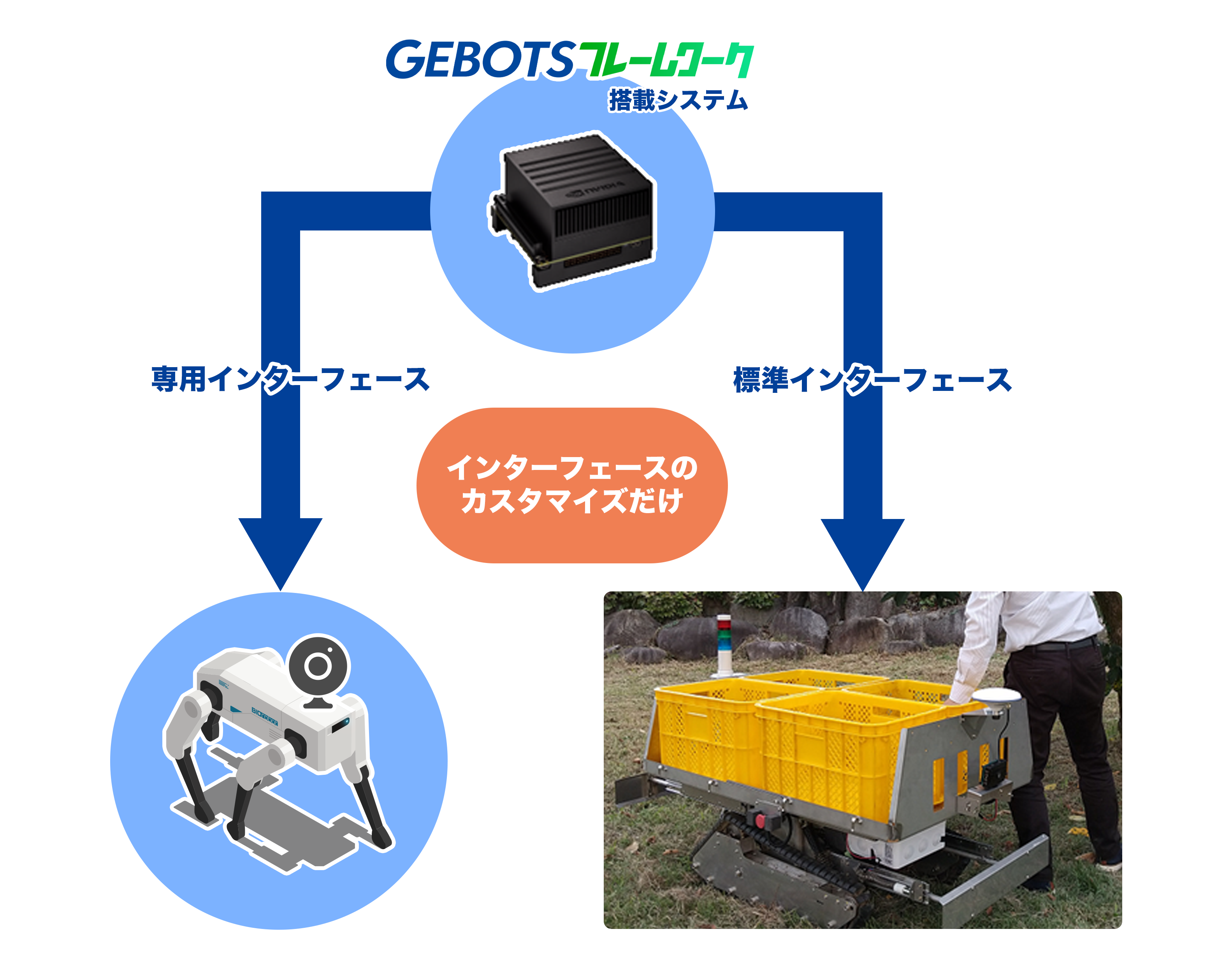
屋外にて、四足歩行ロボットに自動走行させながら撮影することで、これまで人が長時間歩いて巡回していた労働力、作業時間を軽減させることに寄与しました。
四足歩行ロボットを活用することにより、人による点検が難しいエリアにも立ち入ることができ、さまざまな用途で活用いただけます。
また、自動運搬ロボットのシステムを利用し、車両制御の一部を四足歩行ロボット向けにカスタマイズするだけで実現できたため、開発の期間およびコストを大きく低減しました。対応させる車両の指定もなくさまざまな車両に応用することが可能です。
室内自動清掃ロボット
室内の自動清掃ロボットの開発事例です。
屋外のようにGPS/GNSSによる高精度位置測位が利用できないため、画像認識や点群情報から周辺環境を認識して、室内をくまなく走行します。
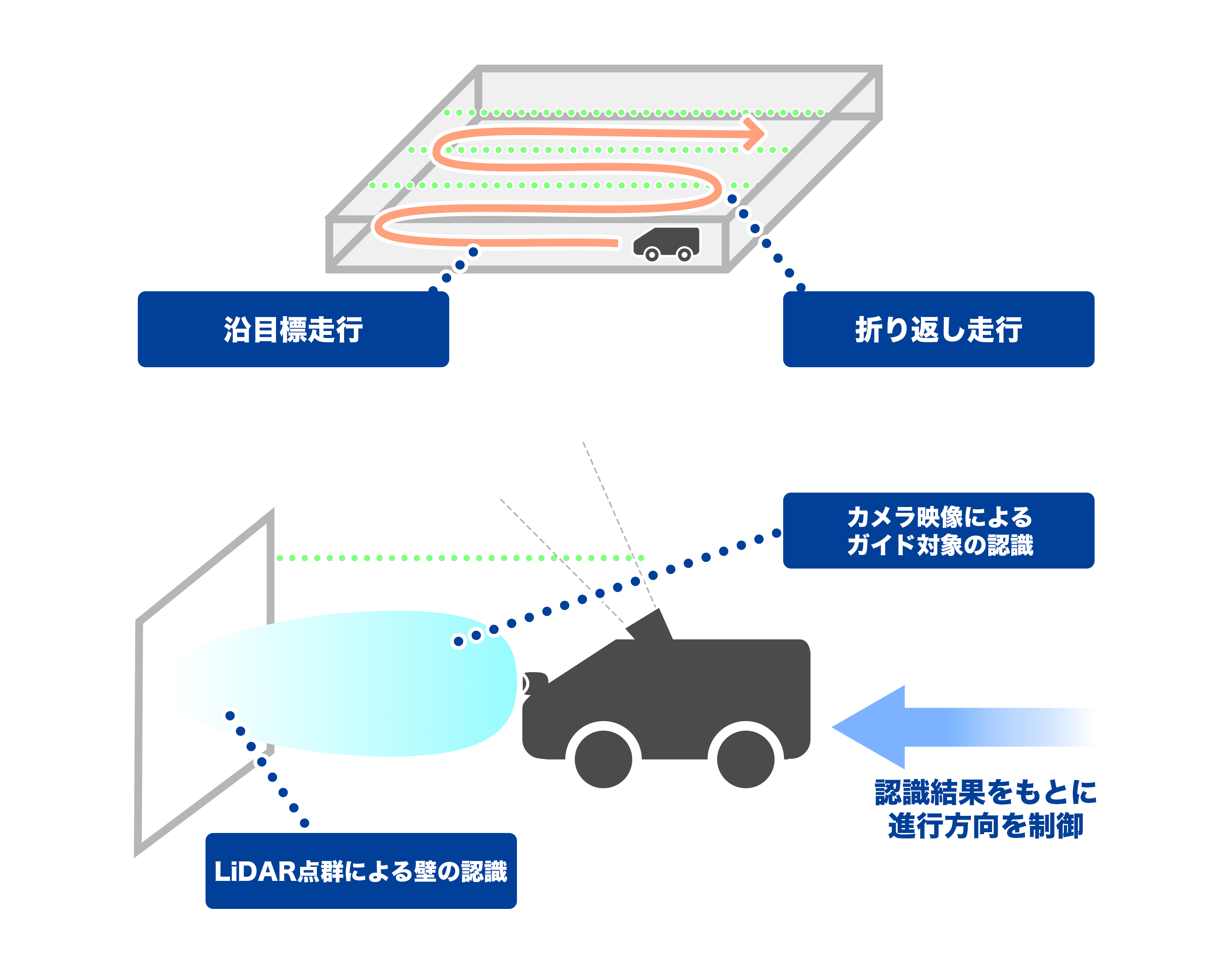
沿目標走行
室内上方にあらかじめ設置された、ガイドとなるマーカーをカメラ映像から画像認識し、ガイドに沿って室内を走行します。 (主に部屋中央部の直進制御に活用)
折り返し走行
LiDARで測定した点群データより、前方や側方の壁(平面)との位置関係を認識し、次の走行ラインへ折り返します。(主に部屋末端部のUターン制御に活用)
自律走行型草刈り機
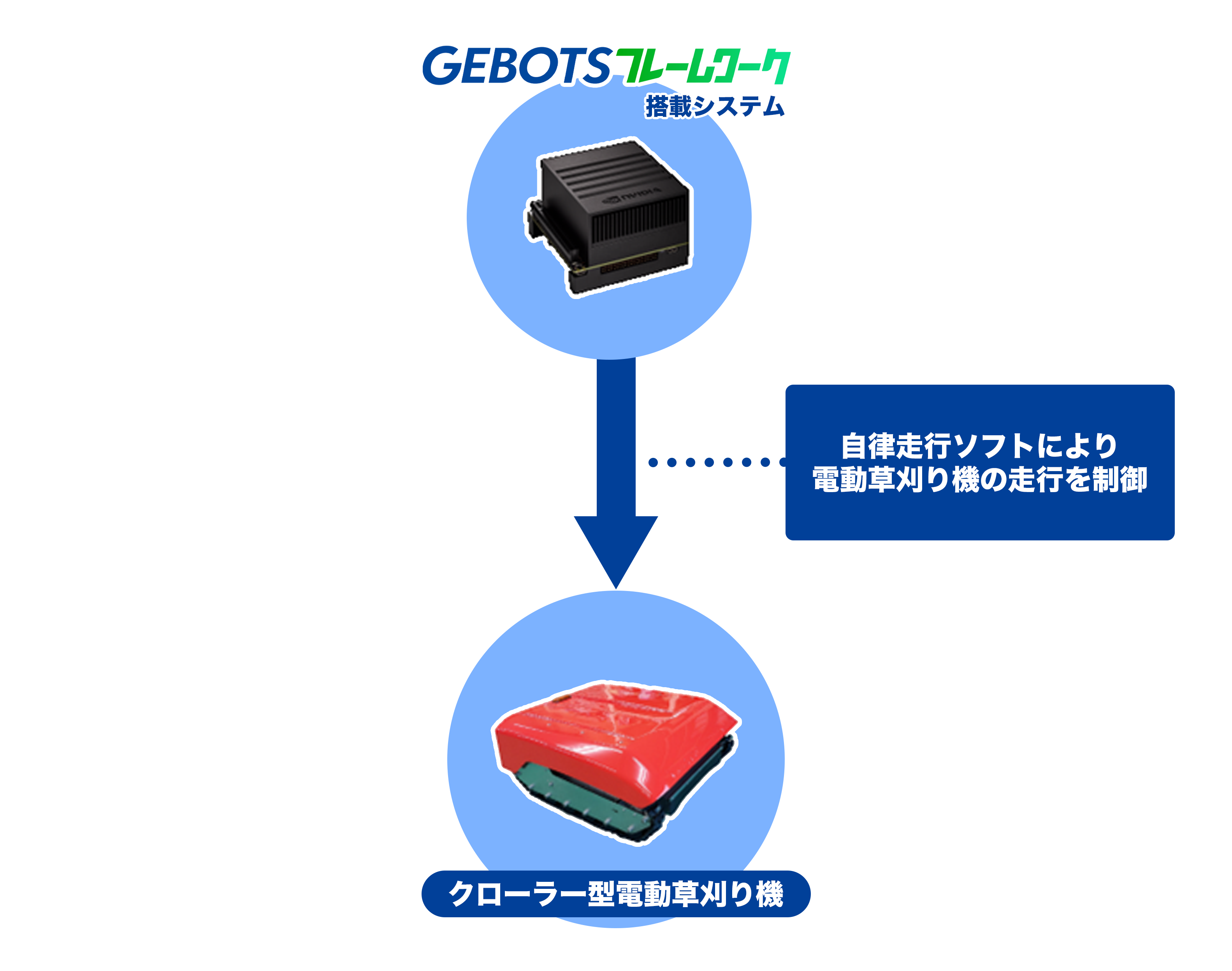
クローラー型電動草刈り機の自律走行による草刈り作業の自動化事例です。
自動運搬ロボットの技術を応用し、商用に技術展開したものです。
ユーザーが指定した作業エリア内を隙間なく走破するルートを算出し、そのルートに沿って自律走行することで、刈り残しの少ない自動草刈りを行います。
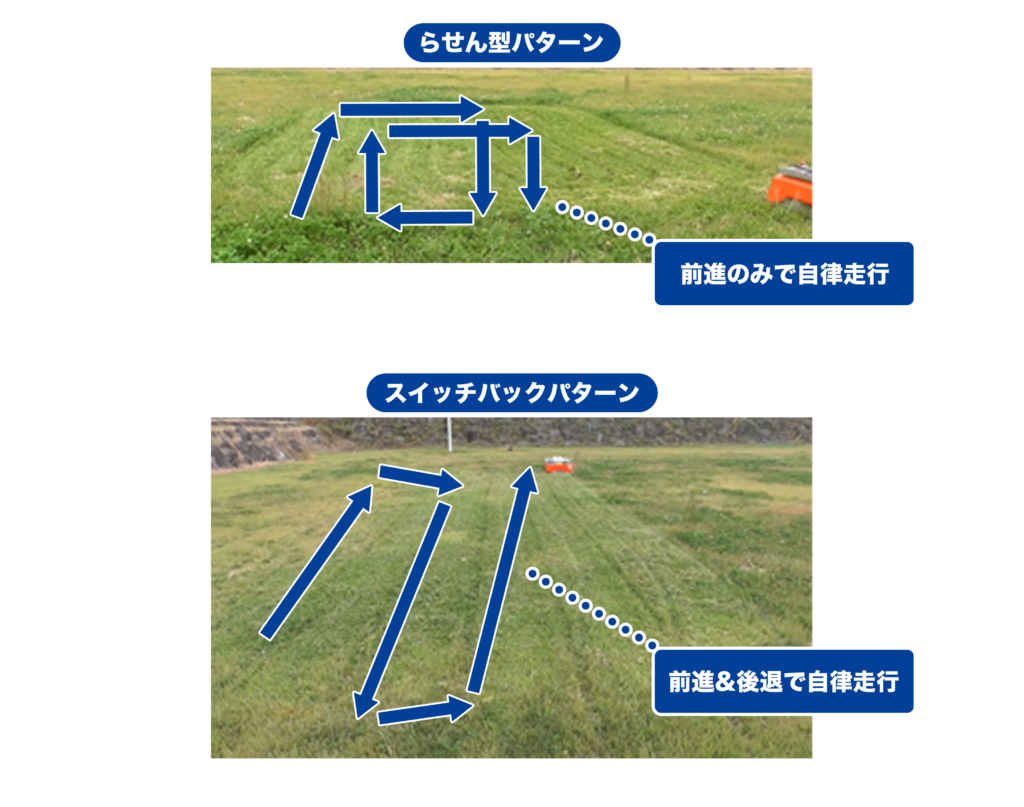
指定エリア自律走行
高精度位置測位(RTK-GNSS)により指定エリア内を自律走行します。
現場の状況に応じて複数の走行パターンを選択可能なため、矩形のエリアや、細長いエリアなど、多彩な環境に適用できます。
作業エリアはタブレット操作で遠隔から指示することができます。
スタック検知
草刈り機の状態を監視し、草や路面の抵抗によるスタックを自動検知して、すぐに作業管理者に異常発生を遠隔通知します。
電波状況監視
電波状況(衛星電波、通信電波)を監視することで、自律走行制御の精度劣化を予測し、草刈りを自動停止します。
<トライアルページ>
https://adas.nswmobility.jp/lp.html

