ETロボコン結果
私たちNSWの新入社員8人(各拠点配属:渋谷6人 名古屋1人 山梨1人)のメンバーは、2024年10月20日に開催された「ETロボコン2024 シミュレーター部門 エントリークラス大会」に参加しました。
エントリークラスは46チーム参加しており、私たちNSWはモデリングで最高評価のA評価を頂き、結果は走行が9位、総合5位でした。
ETロボコン大会への参加はとてもよい経験になりましたので、大会までの活動や大会に出て感じたことをお伝えしたいと思います。
ETロボコンとは?
技術教育の機会提供を目的とし、初心者からベテランまで幅広い層が相互に刺激しあえるロボットコンテストで、組込みソフトウエア開発を通じた分析・設計・制御モデリングなど、開発の一連を学ぶことができます。
コンテストの順位付けは、設計図(モデル図)と競技(ロボットの走行)の両方を採点して、総合成績の評価となります。
レベルにあわせて3クラス(エントリークラス、プライマリークラス、アドバンストクラス)に分かれていて、今回、私たちはソフトウエア開発や設計の未経験者向けであるエントリークラスに参加しました。
設計図作成時に工夫した点
まず、設計図(モデル図)について紹介します。
参加するチームは、ソフトウエアをどのように設計して開発をするのかを示す設計資料を作成し、提出する必要があります。その設計資料をモデル図と呼びます。
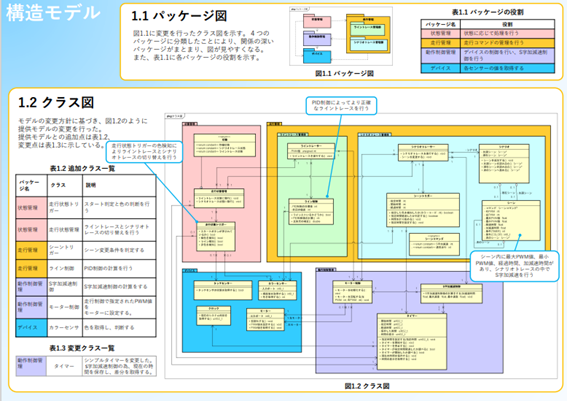
「機能」「構造」「振る舞い」をそれぞれUML図に落とし込んで作成します。私たちは、モデル図を作成する際に以下の3点を重要視しました。
昨年度資料の調査
NSWでは、毎年、新入社員がチームで参加しており、昨年の参加チームが作成したモデル図や審査員のコメントをもとに、具体的に注意するべき点などを調査しました。コメントの例としては「属性に不足がある」、「クラス名を変更したほうが良い」などがありました。そのため私たちは「属性の役割」「クラス名の付け方」などに注意して第三者が見ても理解しやすいモデル図を作成しました。
チーム内での意見交換
初めてUML図について触れるメンバーが多く、手探りでモデル図の作成を進めていました。その状況を改善するため、週1回の定例会議を開き、そこで話し合いを行うことで疑問点や意見交換のしやすい環境を作ることができました。定例会議を開くことはコミュニケーションの活性化にもつながりました。
スケジュール管理
モデル図の作成経験があるメンバーがいなかったため、人員や時間をうまく割り振ることができず、進捗状況を把握することが大変でしたが、こちらも密にコミュニケーションをとることで解決しました。そこから私たちは、こまめな進捗のトレース、遅れがあった際のリスケやリカバリー実施の大切さを学びました。
上記3点を実施したことによりA評価を獲得することができたと考えています。今大会の結果を見るとほとんどのチームがA評価を獲得しているため、上位に入るためにはモデル図のA評価は必須であると感じました。今回、私たちはモデル図に力を入れたため全体5位に入れたと考えています。改めてモデル図をわかりやすく作成することが重要だということが学べました。

開発時の工夫点
次に、もう一方の競技(ロボットの走行)について記載します。まずは、競技の順位の決め方について説明します。
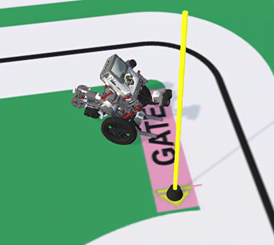
競技の順位は、スタートからラップゲートを通過するまでの時間(走行ポイント)+ブロック運搬でクリアしたポイントやゴールした時のポイント(ボーナスポイント)などを合計したリザルトポイントの高さで競います。
私たちはより高いポイントを獲得するために、以下を意識して作業しました。
昨年度のデータを研究
私たちが出場した24年度のETロボコンのコースは、23年度のコースとほぼ変更がなかったため、23年度に参加したチームを参考に作戦を立てました。昨年度の上位チームの走行ルートや速く走るための工夫に着目して、実装を進めました。
得点獲得のための作戦
私たちはラップタイムを短縮する作戦を立て、それを実現するために2つの技術を取り入れました。
走行ルートのショートカット
ショートカットを取り入れることで、ライン上を走行するよりも早くラップゲートを通過できます。
S字加減速制御
S字加減速制御を取り入れることで滑らかに速度を変化させることができます。
それにより車体を常に安定させて走行することができ、走行の再現性を高めることができます。
これらの方法を取ることでラップタイムを短縮する走行ができました。
上記を踏まえて私たちは走行9位を獲得することができました。
私たちがより高い順位を獲得するために他にできることがなかったかを振り返っていたところ、いくつかのチームは、大会期間中に開催されていた試走会にも参加しており、他のチームから着想を得たり、走行のアドバイスをもらっていたと大会中のインタビューで語っていました。
大会では想定通りの走りができましたが、改良の余地やアイデアを得る機会を逃してしまったことは大きな反省点であり、次回参加の際は、積極的に改善に取り組みたいと思います。
おわりに
私たち[ロボコンブル交差点]ことNSW新入社員8名は、今回のETロボコンにおいて、モデル評価A、総合順位5位と好成績を収め、約半年間にわたるETロボコン活動を成功裏に終えることができました。
しかし、この結果に至る過程には、活動拠点の違いやチーム開発の経験が少ないゆえにさまざまな困難がありました。
活動拠点の違いによって開発作業をオンライン上で実施しなければならず、対面での開発と比べて、密な連携が取れないため、個々人の進捗状況や実務の量など細かな把握が難しく、スケジュール通りに作業を進めることが困難でした。
そこで私たちは、週に1回の定例会の開催に加え、時間のあるメンバーを募ってミーティングを実施し、レビューやお互いにアドバイスをしあいながらコミュニケーションの機会を多く取ることで、作業の円滑化と進捗状況および知識の共有を図りました。
これらの工夫が、スキルの差異や不明点の解消に大いに役立ち、今回の好成績につながったのだと思います。
今後の業務においても、今回の活動で得られた経験は私たちの助けになってくれるはずです。
これからは実務も一層高度になり、責任感を持った行動も必要になるとは思いますが、実力と経験を積んで、精進していきます。
半年間のETロボコン活動、本当におつかれさまでした!
関連リンク
モビリティソリューション | モデルベース関連ソリューション
ETロボコン | 組込みソフトウェア技術教育をテーマとした「ETロボコン」